
取消
清空記錄
歷史記錄
清空記錄
歷史記錄



超精密雙面拋光的加工原理
超精密雙面拋光加工是應用化學機械拋光(CMP)技術,靠工件、磨粒、拋光液及拋光盤的力學作用,在工件的拋光過程中,產生局部的高溫,從而使直接的物理化學變化直接發生在工件與磨粒、拋光液及拋光盤之間,導致工件的表面產生化學物理變化的反應物。由于力學作用與化學作用的重迭,使得工件表面的反應物不斷被磨去,從而使工件表面平滑化。雙面拋光技術是在單面拋光加工技術的基礎上發展起來的,由于它在薄片工件的加工過程中能避免應力差與粘結誤差引起的變形問題。
因此與單面拋光加工相比,雙面拋光具有加工效率高,表面變形小,易獲得超光滑加工表面的特點。
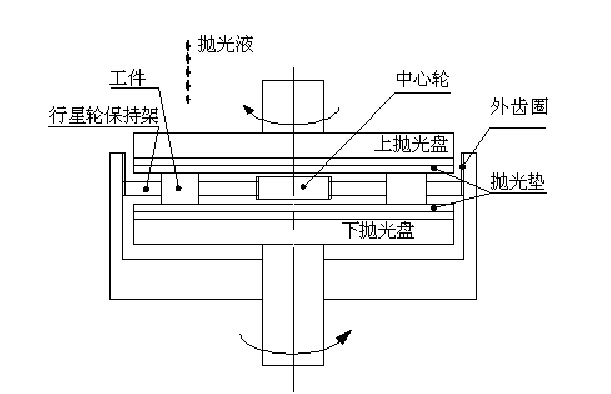
一般的超精密雙面拋光系統是由承載工件和下拋光盤的工作臺、施加載荷的上拋光盤、帶動工件旋轉運動的行星輪以及供給拋光液的裝置四大構件組成,系統構造如圖所示。在雙面拋光的過程中,由于拋光液與拋光墊之間的物理運動,導致拋光液內部的化學溶液以及磨粒于工件產生化學變化,同時在上拋光盤對工件的旋轉壓力的作用下,使工件表面產生的化學反應物得到切除。其原理就是,在不斷的化學變化中工件表面生成一種化學膜,同時由于旋轉機械摩擦切除作用去除這一層化學膜,在不停地交替中獲得超精密表面,這種超精密表面加工也被稱為游離磨料的CMP。在這種加工中,不能選用比工件硬度高地磨粒,只能選用硬度比工件軟或是與之相當的磨粒。在機械與化學的雙重作用下,工件表面不斷生成一層極薄的化學膜,同時又被切除,達到極薄表面的加工,所以可以實現高精度、低表面粗糙度、無表面加工缺陷的工件表面。但是目前的研究在反應層的產生與去除的細節問題上還不是很清晰,需要進一步深入研究。
超精密雙面拋光的運動原理
雙面拋光機整個運動機構可看成為一個差動式的行星輪系。其結構簡如圖2-2 ( a > 所示。四個伺服電動機通過帶傳動分別帶動四根主軸轉動后,中心輪、外齒圈、上拋光盤以及下拋光盤分別以設定的角速度進行轉動。將需要拋光的工件放置與行星輪中,使其與行星輪的內壁有一定的間隙,這樣工件就可以在行星輪之中實現小范圍的自由移動。根據差動原理,我們可以得到,在中心輪與外圈齒輪的做反向旋轉時,行星輪通過齒輪的禍合關系將被其帶動,以一定的角速度繞中心軸實現轉動,同時還帶自轉,這樣就實現了工件的公轉與自轉。在上拋光面載荷力的作用下,工件通過與上下拋光墊的發生摩擦運動,由于摩擦力的作用,工件與上下拋光墊、拋光液以及拋光液中的磨粒發生化學物理變化,由此工件的表層材料發生反應并被去除,以獲得超光滑表面的效果。
雙面拋光的運動原理如圖2 ( b )所示。在拋光開始前,沒有通電源,中心輪與外齒圈都處于靜止狀態,此時工件也處于靜止狀態。當拋光開始時,上下拋光盤在各自的電機轉動下,實現角速度為口:的反方向旋轉運動,中心輪與外齒圈也分別在各自電機轉動下,以各自的角速度口,與口3進行反方向的自轉運動,行星輪9隨著中心輪與外齒圈做旋轉運動,而其中的待加工工件便隨之一起被動運動。拋光液通過上拋光盤3流入拋光區域,提供相應的磨削與潤滑的效果,同時提供化學變化的材料。
雙面拋光加工時,上拋光盤的向下載荷由氣缸6向下加壓,同時在壓力傳感器7的實時監測下,實現壓力的實時感應。上下拋光盤的轉速基本相同,但方向相反,這樣的做的目的是為了減少工件所受的作用力。工件的運動有兩種情況,當行星輪9靜止不動時,此時工件的運動比較簡單,就是在上下拋光盤的反相摩擦力作用下,實現自轉運動; 當行星輪繞中心軸轉動時,此時工件的運動就比較復雜,工件隨行星輪的公轉的同時,又有上下拋光面摩擦力帶來的自轉運動,因而工件做復雜的曲線運動,這樣能更好地使工件表面獲得均勻的拋光。
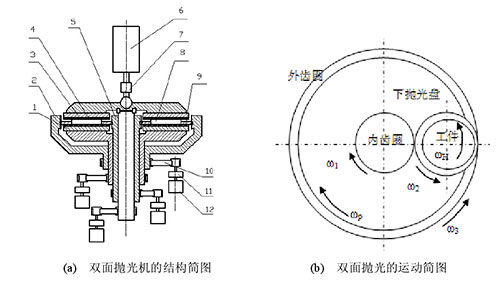
1一下拋光盤2一外齒圈3一上拋光盤4一拋光墊5一中心輪6一氣缸7一壓力傳感器8一工件9一行星輪10一皮帶11-減速器12一電機 圖2雙面拋光的加工原理

 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~



